
标题:无人机影像目标检测及跟踪控制研究
英文标题:Research on UAV Image Target Detection and Tracking Control
作者:马博迪
指导教师:刘贞报 教授
培养单位:民航学院
学科:载运工具运用工程
读博寄语:努力学习,积极向上。
主要研究内容
在国家级重点基金项目,陕西省重点研发计划项目和西北工业大学博士论文创新基金的资助下,本研究以载运工具运用工程特色学科为背景,以赋予无人机更高的智能化水平为目标,以人工智能技术为主线,开展无人机影像目标检测与跟踪控制技术,以期能为提高无人机自主能力、智能化水平的相关研究提供一定参考,本文的研究内容和创新成果如下所述:
(1) 针对航空影像目标检测中常见的挑战,如目标旋转和图像背景复杂等,设计了旋转不变深度森林模型,用于分析和提取航空影像中的目标特征。该模型生成旋转不变的深层语义特征描述符,相较传统深度学习模型,其还适用于小样本数据集。经多个数据集的实验验证,所提算法表现出高准确度,有效地检测了航空影像中的常见目标,且在多个评价指标上优于现有方法。为应对无人机影像目标跟踪过程中的挑战,如目标旋转、遮挡和训练样本多样性不足,提出了一种基于形态自适应网络的无人机航空影像目标跟踪方法。通过数据扩增增加训练样本的多样性,扩展模型对目标形态变化的适应性;采用改进深度置信网络提取强表征能力的深度特征。综合预定位和精确定位方法,在保持实时性的同时,更好地挖掘目标表征信息,自适应调整目标宽高比,定位目标所在区域,提高对目标形态和影像背景变化的鲁棒性;使用深度森林模型提取类别信息,得到高精度的目标跟踪结果。在多种跟踪场景测试中,所提方法展现出优异的性能,能够有效适应无人机影像中目标的形态变化,具备出色的跟踪准确性、稳定性和鲁棒性。

图1 基于深度森林模型的航拍图像目标检测
(2) 面向抗风环境下的多旋翼无人机跟踪控制任务,基于强化学习理论中的深度确定性策略梯度算法,设计了一种多旋翼无人机抗风控制器,能够对外界环境变化进行快速响应,且具有良好的鲁棒性与控制精度。提出一种基于强化学习的飞行控制策略舒缓算法,能够有效提高无人机智能体对动态环境的探索效率;提出重要性权重自适应算法来提高无人机对动态环境的适应性。在训练过程中加入随机扰动模拟环境风干扰,能够有效增强控制器对动态变换环境的鲁棒性。通过仿真模拟实验,和实飞实验验证了所提方法的性能,并与典型算法进行了对比分析,证明了所提方法的优越性。
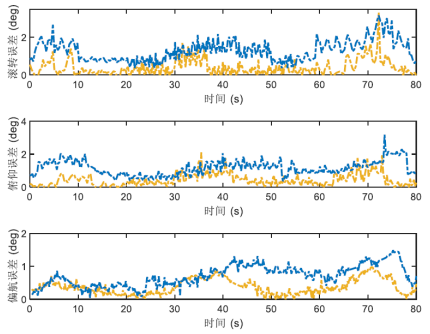
图2 风扰环境下基于强化学习算法的无人机姿态控制
(3) 面向快速跟踪的垂直起降无人机飞行控制任务,本研究提出了一种基于强化学习的垂直起降无人机抗风跟踪控制算法,用来控制无人机对动静态目标进行保距跟踪飞行。考虑到无人机接近目标和跟随飞行两阶段不同的特点,将相对位置误差、速度误差、和姿态角度误差设计在强化学习奖励函数中,使用神经网络来模拟无人机控制系统输出最优控制信号。在训练环境中加入了常风信号、变风信号、和强风信号三种干扰信号,来提高所提控制器的抗风性能。提出了基于量子加速的经验池优化算法,用来提高模型学习效果,提升了控制精度。在多种不同飞行工况下开展仿真实验和实飞实验验证了所提算法的有效性,在RMSE误差和最大跟踪误差等指标上优于现有算法。
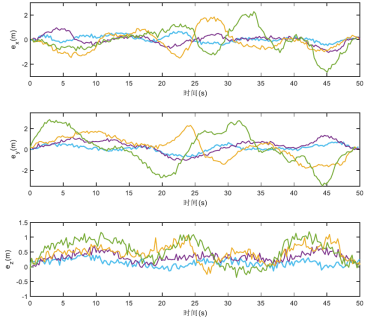
图3 面向快速跟踪的垂起无人机位置控制
(4) 面向GPS失效环境下多机编队的无人机跟踪任务的特点。首先设计了一种基于激光雷达的多无人机协同定位算法,通过对激光雷达点云数据和无人机预设编队位置向量进行匹配,得到当前机群内部各无人机精准位置信息。基于强化学习技术,使用神经网络模拟无人机非线性控制模型,设计了一种新的碰撞风险评估地图,用于估计对编队无人机碰撞概率,进行防撞控制,进一步的设计了一种动态优先级经验重放算法来提高控制模型的学习效率和实用性。在多种编队队形下开展仿真实验和实飞测试验证了本文所提算法的有效性和鲁棒性。
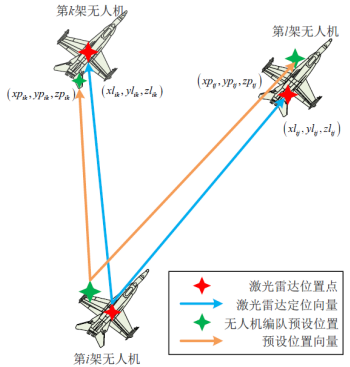
图4 所提基于定位向量匹配的多无人机编队协同定位算法
主要创新点
(1) 针对无人机航拍影像的多角度旋转、复杂背景及有限数据集问题,提出了一体化解决方案。引入旋转不变深度森林模型,逐层融合原始特征与上下文特征,显著提升图像检测与识别性能。对于目标形态变化跟踪,设计基于形态自适应网络的无人机航拍影像目标跟踪方法,引入Q学习算法的自适应搜索机制与深度特征变换,有效实现自适应跟踪和识别。
(2)面向抗风环境下的多旋翼无人机跟踪控制任务,提出基于强化学习算法的多旋翼无人机跟踪控制器,在学习阶段通过策略舒缓算法和权重自适应算法充分利用经验池样本数据的差异性特征,对智能体进行有效训练,使得无人机能够在动态风扰环境下进行稳定控制。
(3)针对垂起无人机快速跟踪飞行任务的特点,基于垂直起降无人机跟踪控制不同阶段的特点, 提出一种基于强化学习算法的垂直起降无人机跟踪控制器,通过量子加速算法提升模型训练效率,在训练阶段加入随机风扰信号,提高模型对动态环境变化的适应性,相比于现有强化学习控制算法,本文方法在学习效率、抗风性能、跟踪精准度方面都有优势。
(4)解决垂起无人机在GPS失效环境中进行编队跟踪的技术难点,提出基于激光雷达的多无人机协同定位算法,能够有效对机群内部无人机进行精准定位,设计基于碰撞概率图模型的多无人机跟踪控制算法,实现垂起无人机高精度编队跟踪控制,同时具有防撞避障功能。
代表性创新成果
1. 学术论文
[1] Bodi Ma, Zhenbao Liu, Feihong Jiang, Wen Zhao, Qingqing Dang, Xiao Wang, Reinforcement learning based UAV formation control in GPS-denied environment, in Chinese Journal of Aeronautics, 2023, ISSN 1000-9361.
[2] Bodi Ma, Zhenbao Liu et al., Target Tracking Control of UAV Through Deep Reinforcement Learning, in IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 6, pp. 5983-6000, June 2023.
[3] Bodi Ma, Zhenbao Liu et al., Deep Reinforcement Learning of UAV Tracking Control Under Wind Disturbances Environments, in IEEE Transactions on Instrumentation and Measurement, vol. 72, pp. 1-13, 2023, Art no. 2510913.
[4] 刘贞报,马博迪,高红岗等.基于形态自适应网络的无人机目标跟踪方法[J].航空学报,2021,42(04):487-500.
2. 授权专利
[1] 刘贞报,马博迪,江飞鸿, 张超,布树辉. 基于卷积受限玻尔兹曼机的无人机图像目标检测方法[P]. 陕西省:CN111291634B,2023-07-18.
[2] 刘贞报,马博迪,江飞鸿,钟洋,骆再侬,梁盟博. 基于激光雷达与人工势场法的无人机编队飞行避障方法[P]. 陕西省:CN110764531B,2023-01-03.
[3] 刘贞报,马博迪,江飞鸿, 韩雨珅,张超,布树辉. 基于激光雷达与定位向量匹配的多无人机协同定位方法[P]. 陕西省:CN111208526B,2022-07-08.
 官方微信公众号
官方微信公众号