
标题:多智能体系统指定时间协同控制问题研究
英文标题:Study on the appointed-time cooperative control problems for multi-agent systems
作者:周媛
指导教师:赵宇 副教授、刘永芳 副教授
培养单位:自动化学院
学科:控制科学与工程
读博寄语:你做三四月的事,在八九月自有答案
主要研究内容
近年来,许多实际工程应用如卫星编队、传感器网络等对多智能体系统实现协同控制速率的要求越来越高,其快速协同算法的设计面临着许多挑战性的难题:一是现有的算法只能保证系统在有限时间内完成任务,无法根据需求提前指定任务完成时间;二是现有的算法使用连续信息而非采样信息,对系统的通信能力提出了较高的要求;三是许多算法仅适用于无向固定网络,而实际的多智能体系统往往建立在有向、切换等一般网络上。基于此,本项目依托自动化学院基础前沿研究中心,在博士论文创新基金资助下,对多智能体系统指定时间协同控制问题展开研究,主要研究内容如下:
(1)基于最优控制方法,设计多智能体系统指定时间二分一致性控制算法。
将庞特里亚金极大值原理引入到协同控制中,提出“外环规划+内环控制”的设计思想,通过“外环规划”实现对任务时间精准控制,通过“内环控制”实现对智能体状态协同控制,解耦了时间与空间在算法设计过程中的耦合,实现有向拓扑下多智能体系统指定时间二分一致性。
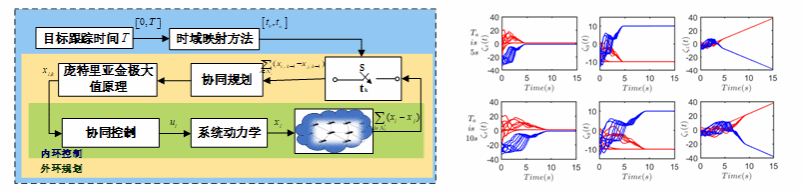
图1 多智能体系统指定时间控制框图(左)和指定时间结果(右)
(2)基于输出测量方法,设计多智能体系统攻击免疫指定时间二分一致性控制算法。
多智能体系统攻击免疫控制意味着智能体之间的通讯信道受到严格保护,不允许任何形式的通讯发生。因此设计了一种指定时间状态观测器,可依据相对输出信息观测相对状态,实现攻击免疫下多智能体系统指定时间二分一致性控制。
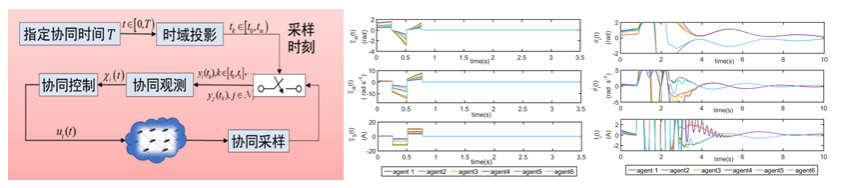
图2 多智能体系统攻击免疫控制框图(左)和指定时间结果(中、右)
(3)基于矩阵摄动理论,设计有向多智能体系统指定时间分布式平均跟踪算法。
分布式平均跟踪问题在协同环境感知、协同地理测绘等领域有着重要的应用背景。研究难点在于有向通讯网络会造成系统状态漂移。因此,引入矩阵摄动理论解决这一问题,达到智能体在指定时间跟踪所有参考输入平均值的目的。
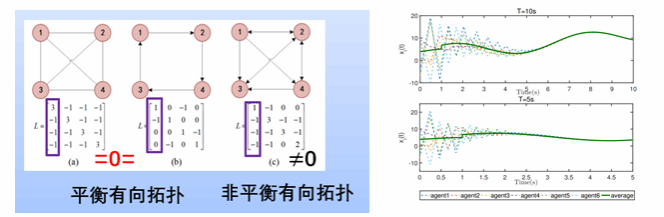
图3 有向网络对实现多智能体系统分布式平均跟踪影响(左)和指定时间结果(右)
(4)基于积分反馈方法,设计非线性多智能体系统指定时间编队跟踪算法。
针对存在外部干扰、未建模动态等不确定因素影响下的多智能体系统,将其建模为非线性动力学。通过积分反馈技术抵消了非线性部分对系统实现协同控制的影响,在指定时间实现对高速动态目标的编队跟踪控制。
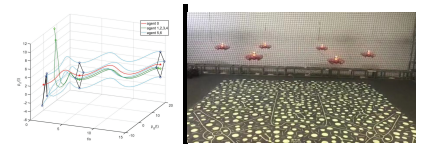
图4 多智能体系统指定时间编队跟踪控制仿真和实验结果
主要创新点
提出了多智能体系统指定时间协同控制理论与方法,突破了已有结果对系统通讯模式和收敛时间的保守约束,其主要创新点可概括为:①运用时间约束下的最优控制方法,有效地解耦了系统时间与空间的耦合关系,消除了传统算法对系统参数的依赖性以及需要估计收敛时间的保守性,使系统实现协同的时间可以根据任务要求事先精确指定;②仅使用采样时刻系统状态信息,不仅满足许多先进的通信设备传输数字信息的要求,还可以有效地减少网络的通信代价,降低了系统信息的计算量和存储量;③提出的指定时间方法放宽了现有算法对通信网络的要求,可适用于更为一般的有向、切换通讯网络。
代表性创新成果
一、发表论文
[1] Zhao Yu; Zhou Yuan; Huang Panfeng; Chen Guanrong. Appointed-time and attack-free bipartite synchronization of generic linear multi-agent systems over directed switching network[J]. IEEE Transactions on Automatic Control, 2022, 67(9): 4498-4513.
[2] Zhao Yu; Zhou Yuan; Liu Yongfang; Wen Guanghui; Huang Panfeng. Fixed-time bipartite synchronization with a pre-appointed settling time over directed cooperative-antagonistic networks[J]. Automatica, 2021, 123(1):109301.
[3] Zhou Yuan; Liu Yongfang; Zhao Yu; Wen Guanghui. Appointed-time formation-containment control for nonlinear multi-agent networks using sample-data feedback[J]. International Journal of Robust and Nonlinear Control, 2023, 33(8): 4616-4635.
[4] Zhou Yuan; Liu Yongfang; Xian Chengxin; Zhao Yu. Appointed-time dynamic average consensus: A holistic planning and multi-step control framework[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2023, doi: 10.1109/TCSII.2023.3243997.
[5] Zhou Yuan; Liu Yongfang; Zhao Yu; Huang Panfeng. Appointed-time average consensus over directed networks[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(6): 2922-2926.
[6] Zhou Yuan; Liu Yongfang; Zhao Yu. Design finite-time consensus protocol for high-order linear multi-agent systems: a gain scheduled approach[C]. IFAC World Congress 2023, Yokohama, Japan, July 9-14, 2023.
[7] Zhou Yuan; Liu Yongfang; Yang Shuo; Feng Yuting; Zhao Yu. Distributed guidance strategy with an appointed cooperative time over directed network[C]. Lecture Notes in Electrical Engineering, 934: 155-166, Shenzhen, China, February 25-26, 2022.
[8] Zhou Yuan; Liu Yongfang; Zhao Yu. Prescribed-time Bipartite Consensus Formation Control for General Linear Multi-agent Systems[C]. IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 2020, pp. 3562-3567.
[9] 周媛,刘永芳,马生昌等.多智能体系统指定时间双向编队控制[J].无人系统技术,2021,4(03):18-25.
二、授权专利
[1] 赵宇;杨澜;刘永芳;周媛.一种集群智能系统协同运动规划与编队控制方法 专利号:ZL202310287976.0
三、荣誉情况
[1] 2022年10月,博士研究生国家奖学金(教育部颁发)
 官方微信公众号
官方微信公众号